机器人选择轮毂电机,本质是驱动方案适配机器人发展需求的结果,相比传统的集中驱动方案,轮毂电机在布局、动力、控制等维度都契合现代机器人对灵活性、集成度与智能化的要求,核心原因可以从五个维度展开。
结构布局优势:节省机身空间,简化传动结构
传统机器人驱动大多采用“电机-减速器-传动轴-车轮/关节”的传动链,需要预留额外空间布置传动部件,不仅增加了机身整体重量,还提升了机械结构的设计复杂度。而轮毂电机将动力、传动和制动装置都整合安装在车轮轮毂内部,直接把动力输出到负载端,省去了中间传动轴、减速器等一系列传动部件,相当于把动力单元和执行单元合二为一。
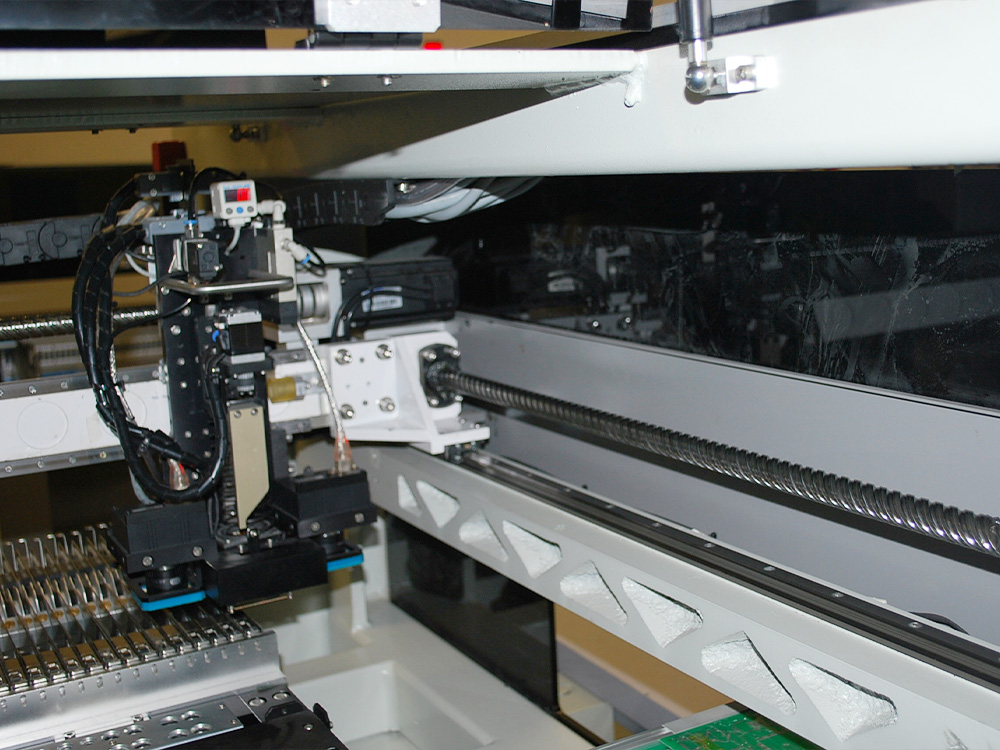
这种集成化设计给机器人机身腾出了大量可用空间:一方面可以容纳更多传感器、电池或控制模块,提升机器人续航和感知能力;另一方面大幅简化了机器人底盘或运动关节的机械结构,降低了整体设计和装配难度,尤其适合空间紧凑的移动机器人,比如服务机器人、AGV物流机器人、足式机器人关节等场景。


运动控制优势:独立控制更灵活
对足式机器人来说,每个关节独立配置轮毂电机,可以实现更精准的力矩控制,配合机器人的姿态感知算法,能更快调整步态适应不平整路面,提升机器人的行走稳定性。此外,多轮毂独立驱动也能实现更丰富的运动模式,比如全向移动机器人通过麦克纳姆轮搭配轮毂电机,能实现任意方向的平移,完美适配自动化车间里对精准走位的需求。
动力效率优势:传动损耗低,提升续航能力
能量利用率直接决定机器人的续航表现,是移动机器人核心性能指标之一。传统集中驱动方案中,动力需要经过齿轮啮合、传动轴传递等多个环节,每个环节都会产生不同程度的机械摩擦损耗,整体传动效率通常在70%-85%之间,很多能量都浪费在了传动过程中。
而轮毂电机直接驱动负载,动力传输路径最短,没有中间环节的额外损耗,传动效率普遍可以达到90%以上,部分高效率方案甚至能超过95%。能量损耗的降低,直接带来了两个好处:相同电池容量下,机器人的续航里程更长;相同续航要求下,可以用更小容量的电池,进一步降低机器人整机重量和成本,形成正向循环。
可靠性与维护优势:减少故障点,降低维护成本
机械结构越复杂,故障点越多,维护成本就越高。传统驱动方案有大量的齿轮、轴承、传动轴部件,长期运行后容易出现齿轮磨损、润滑油泄漏、传动松动等问题,不仅需要定期保养维护,一旦出现故障还要拆解传动系统排查,维修难度大、停机时间长。
轮毂电机整合了动力部件,减少了大量可拆卸的机械连接部件,整机故障点数量大幅下降,结构可靠性更高。而且轮毂电机本身封闭性较好,可以适配粉尘、潮湿等相对恶劣的工作环境,降低了环境因素对动力单元的影响。对工业场景连续运行的物流AGV、户外巡检机器人来说,更高的可靠性意味着更低的运维成本和更长的有效工作时间,经济优势十分明显,当然,轮毂电机并非适用于所有机器人场景,比如重载工业机器人对电机扭矩要求极高,轮毂电机目前还存在重量大、散热难等问题,传统驱动方案依然更有优势。但对大多数服务、物流、巡检、消费级机器人来说,轮毂电机的综合优势远超传统方案,自然成为机器人驱动的主流选择之一。
深圳中菱科技是一家长期致力于电机与驱动工业自动化的公司,其产品已随着客户遍布全球各地,就是凭借产品的高度稳定性得到客户的认可与信任,并已在行业处于了领先地位,且一直坚持不断创新为客户带来最好产品的理念,完整的研发销售体系,给客户提供最好的购买体验,拥有详细的产品体系与架构。