1、国际标准的工业级现场总线,传输可靠,实时性高;
2、传输距离远(最远10Km),传输速率快(最高1MHz bps);
3、单条总线最多可接110个节点,并可方便的扩充节点数;
4、多主结构,各节点的地位平等,方便区域组网,总线利用率高;
5、实时性高,非破坏总线仲裁技术,优先级高的节点无延时;
6、出错的CAN节点会自动关闭并切断和总线的联系,不影响总线的通讯;
7、报文为短帧结构并有硬件CRC校验,受干扰概率小,数据出错率极低;
8、自动检测报文发送成功与否,可硬件自动重发,传输可靠性很高;
9、硬件报文滤波功能,只接收必要信息,减轻cpu负担,简化软件编制;
10、通讯介质可用普通的双绞线,同轴电缆或光纤等;
11、CAN总线系统结构简单,有极高的性价比。
RS485接口标准特点:
1、RS485的电气特性:逻辑"1"以两线间的电压差为+(2-6)V表示;逻辑"0"以两线间的电压差为-(2-6)V表示。接口信号电平比RS-232-C降低了,就不易损坏接口电路的芯片,且该电平与TTL电平兼容,可方便与TTL 电路连接。
3、RS485接口是采用平衡驱动器和差分接收器的组合,抗共模干能力增强,即抗噪声干扰性好。
4、RS485接口的最大传输距离标准值为4000英尺,实际上可达 3000米,另外RS-232-C接口在总线上只允许连接1个收发器,即单站能力。而RS-485接口在总线上是允许连接多达128个收发器。即具有多站能力,这样用户可以利用单一的RS-485接口方便地建立起设备网络。但RS-485总线上任何时候只能有一发送器发送。
5、因RS485接口具有良好的抗噪声干扰性,长的传输距离和多站能力等上述优点就使其成为首选的串行接口。
6、因为RS485接口组成的半双工网络,一般只需二根连线,所以RS485接口均采用屏蔽双绞线传输。
1、速度与距离:CAN与RS485以1Mbit/S的高速率传输的距离都不超过100M,可谓高速上的距离差不多。但是在低速时CAN以5Kbit/S时,距离可达10KM,而485再低的速率也只能到1219米左右(都无中继)。可见CAN在长距离的传输上拥有绝对的优势。
2、总线利用率:RS485是单主从结构,就是一个总线上只能有一台主机,通讯都由它发起的,它没有下命令,下面的节点不能发送,而且要发完即答,受到答复后,主机才向下一个节点询问,这样是为了防止多个节点向总线发送数据,而造成数据错乱。而CAN-bus是多主从结构,每个节点都有CAN控制器,多个节点发送时,以发送的ID号自动进行仲裁,这样就可以实现总线数据不错乱,而且一个节点发完,另一个节点可以探测到总线空闲,而马上发送,这样省去了主机的询问,提高了总线利用率,增强了快速性。所以在汽车等实性要求高的系统,都是用CAN总线,或者其他类似的总线。
3、错误检测机制:RS485只规定了物理层,而没有数据链路层,所以它对错误是无法识别的,除非一些短路等物理错误。这样容易造成一个节点破坏了,拼命向总线发数据(一直发1),这样造成整个总线瘫痪。所以RS485一旦坏一个节点,这个总线网络都挂。而CAN总线有CAN控制器,可以对总线任何错误进行检测,如果自身错误超过128个,就自动闭锁。保护总线。如果检测到其他节点错误或者自身错误,都会向总线发送错误帧,来提示其他节点,这个数据是错误的。大家小心。这样CAN总线一旦有一个节点CPU程序跑飞了,它的控制器自动闭锁、保护总线。所以在安全性要求高的网路,CAN是很强的。
4、价格与培训成本:CAN器件的价格大约是485的2倍这样,485的通讯从软件上是很方便的,只要懂串行通讯,就可以编程,而CAN需要底层工程师了解CAN复杂的层,编写上位机软件也要了解CAN的协议。可谓培训成本较高。
5、CAN总线通过CAN控制器接口芯片82C250的两个输出端CANH和CANL与物理总线相连,而CANH端的状态只能是高电平或悬浮状态,CANL端只能是低电平或悬浮状态。这就保证不会出现象在RS-485网络中,当系统有错误,出现多节点同时向总线发送数据时,导致总线呈现短路,从而损坏某些节点的现象。而且CAN节点在错误严重的情况下具有自动关闭输出功能,以使总线上其他节点的操作不受影响,从而保证不会出现象在网络中,因个别节点出现问题,使得总线处于“死锁”状态。
6、CAN具有完善的通信协议,可由CAN控制器芯片及其接口芯片来实现,从而大大降低了系统的开发难度,缩短了开发周期,这些是只仅仅有电气协议的RS-485所无法比拟的。

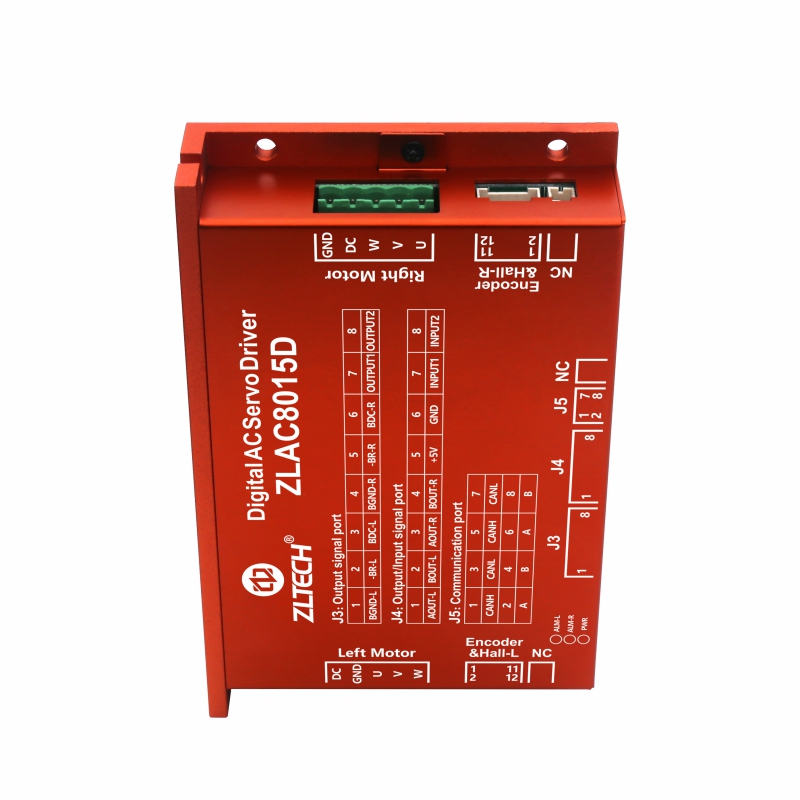
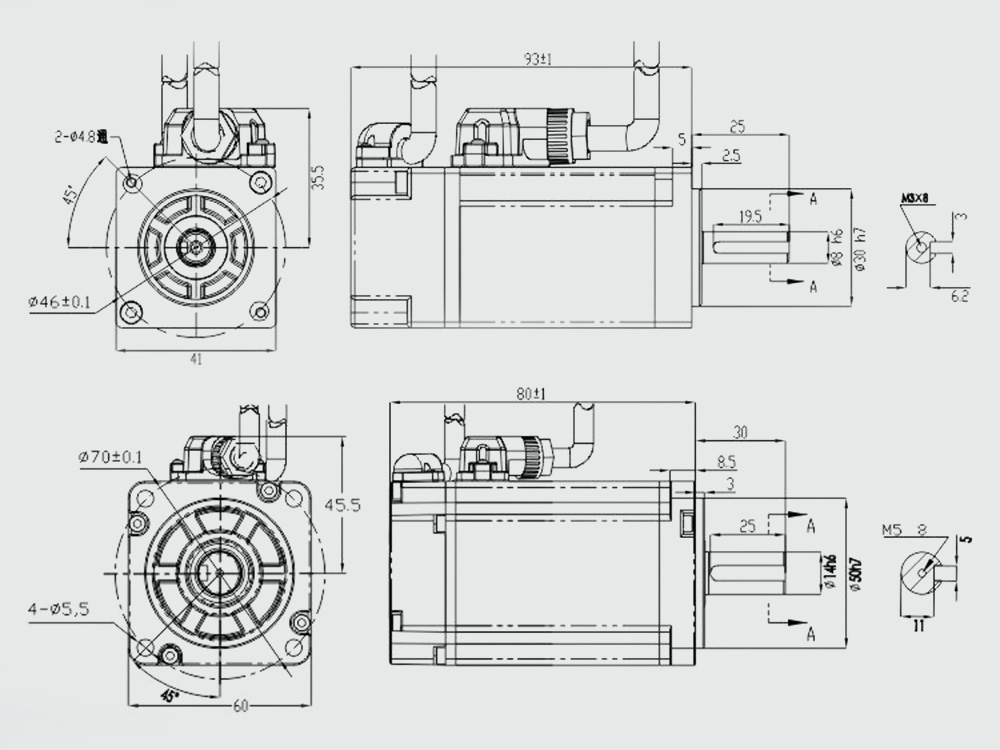
深圳中菱科技有限公司,自2013年成立以来,一直致力于轮式机器人行业,研发、生产和销售性能稳定的轮毂伺服电机和驱动器。其高性能伺服轮毂电机驱动器ZLAC8015、ZLAC8015D和ZLAC8030L,采用CAN/RS485总线通讯,分别支持CANopen协议的CiA301、CiA402子协议/modbus-RTU协议,最多可挂载16个设备;支持位置控制、速度控制和转矩控制等工作模式,适用于各种场合的机器人,大大推进了机器人行业的发展。